Tara and I designed and prototyped a couple of bench and field devices recently. We have a first pass at a Falcon tube turner, a soil microbe quantifier and a soil temperature and humidity probe.
The Falcon tube turner is designed to be used on a bench to mix soil samples as part of the pH, etc. protocols. Currently it’s based on Lego components, if that basic design works we can easily fabricate a couple robust enough for our needs.
Tara has an idea to quantify the amount of soil microbes by measuring their CO2 respiration. We have data for this from 16S extractions done at one of archeology sites at Skalanes, we can re-sample there and compare the two methods. Pictured below is our first pass at a device for doing this.

The soil temperature and humidity probe is a combination of a stainless steel soil coring tool with the two probes built-in to the end of the tube, see below (kind-of).

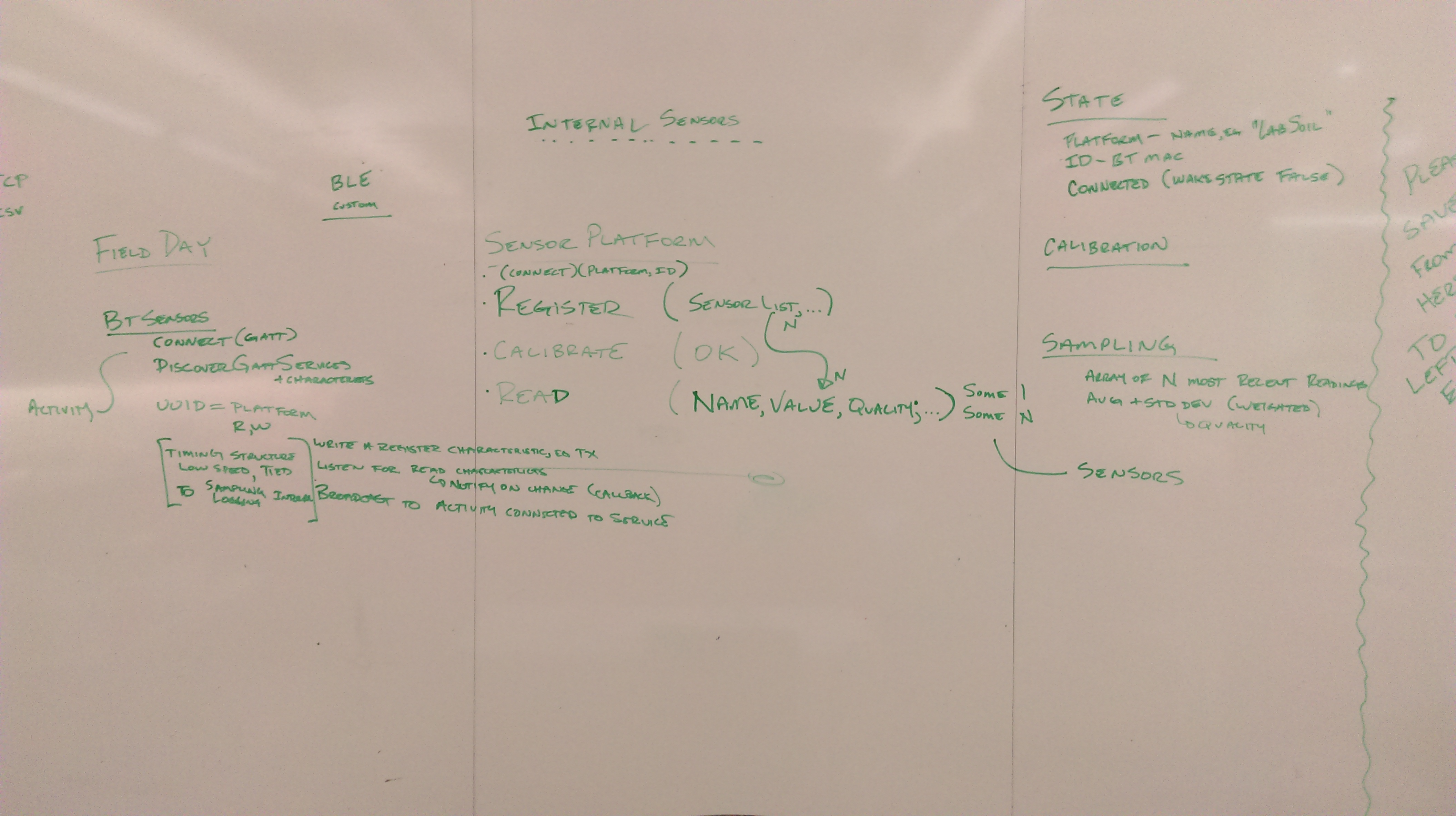
I’ve been working on reconciling the data model with the implications that Kristin brought when we worked-through the sensor <-> Arduino <-> BLE <-> Android <-> data model. Stay-tuned for the details.